publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2023
-
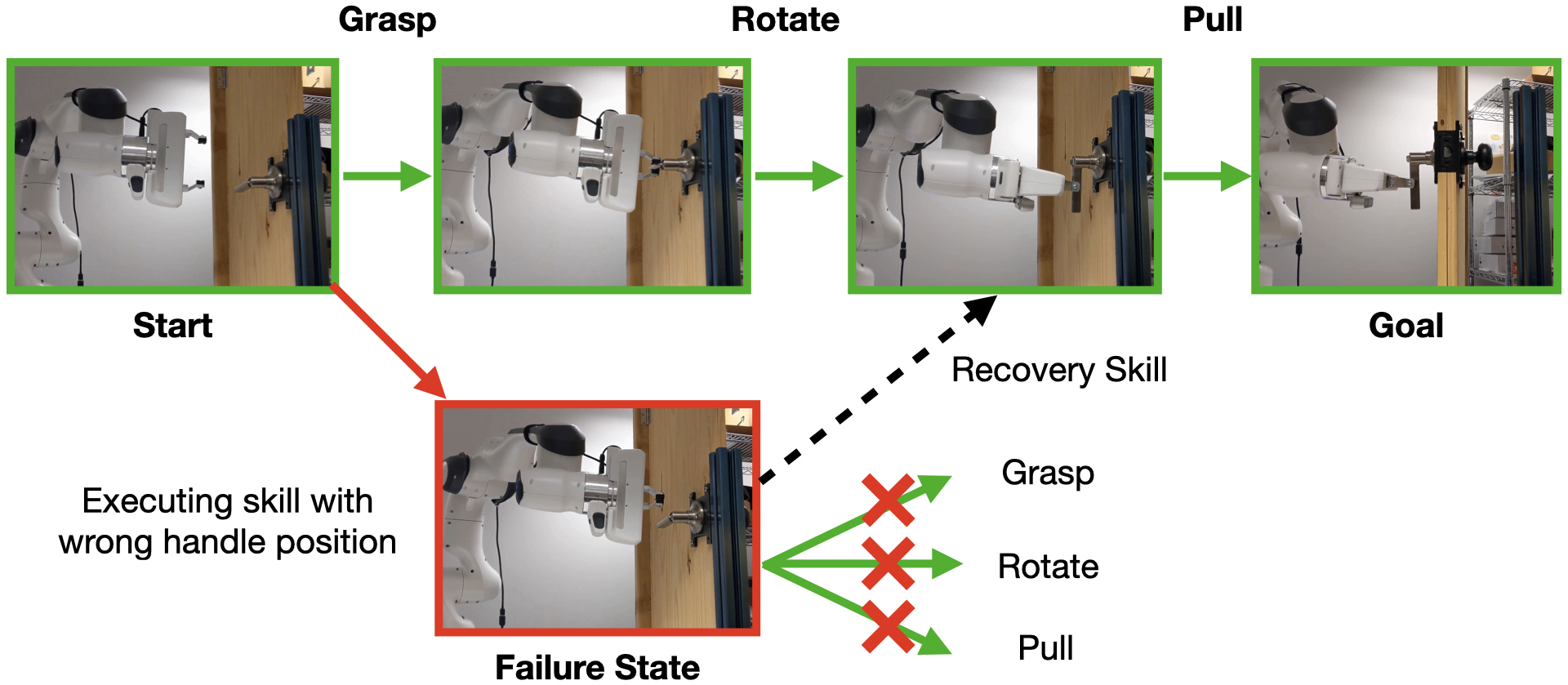 Efficient Recovery Learning using Model Predictive Meta-ReasoningIn 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
Efficient Recovery Learning using Model Predictive Meta-ReasoningIn 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023

2022
-
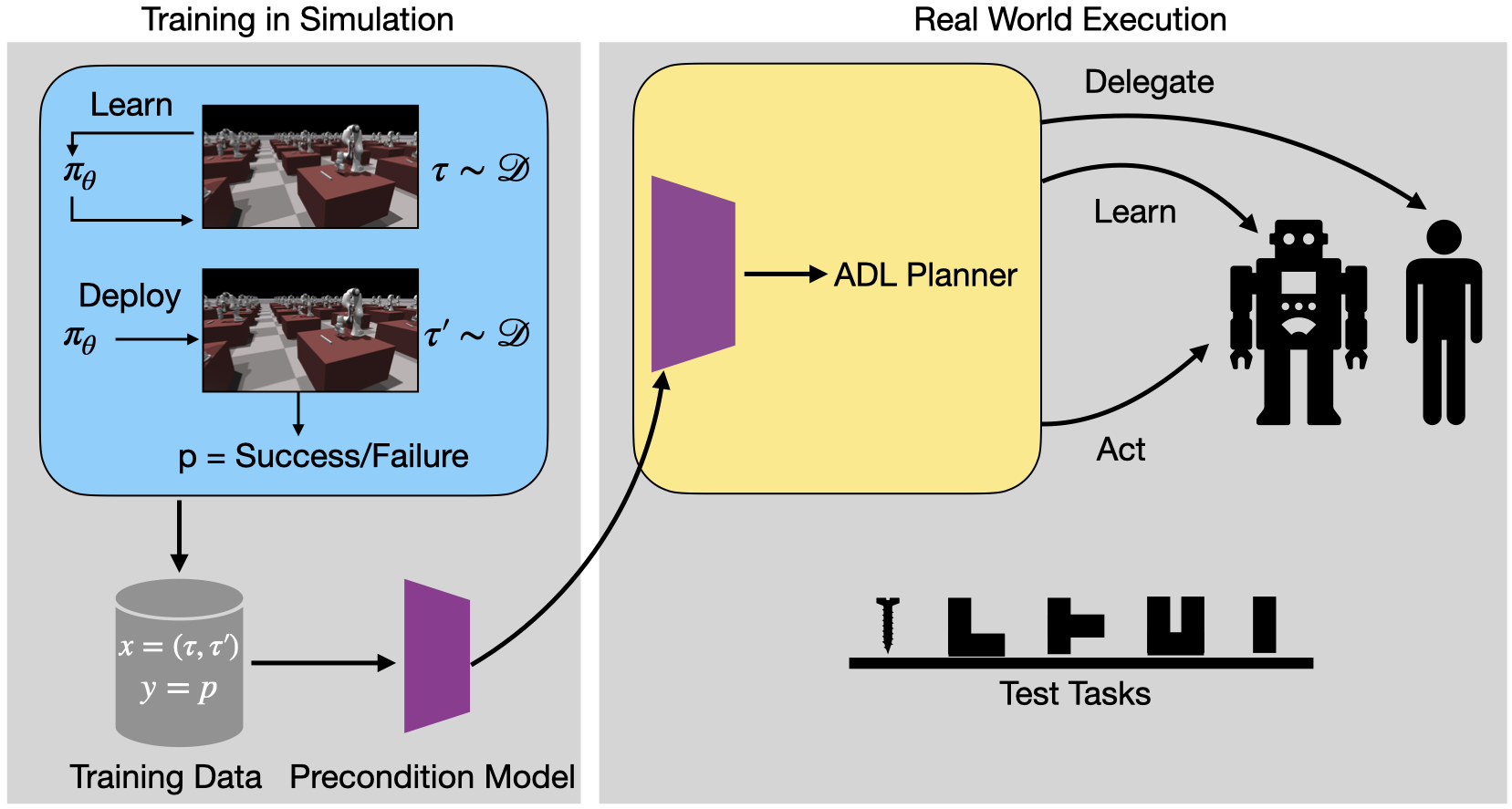 Synergistic scheduling of learning and allocation of tasks in human-robot teamsIn 2022 International Conference on Robotics and Automation (ICRA), 2022Finalist for the Outstanding Paper Award in Human-Robot Interaction
Synergistic scheduling of learning and allocation of tasks in human-robot teamsIn 2022 International Conference on Robotics and Automation (ICRA), 2022Finalist for the Outstanding Paper Award in Human-Robot Interaction -
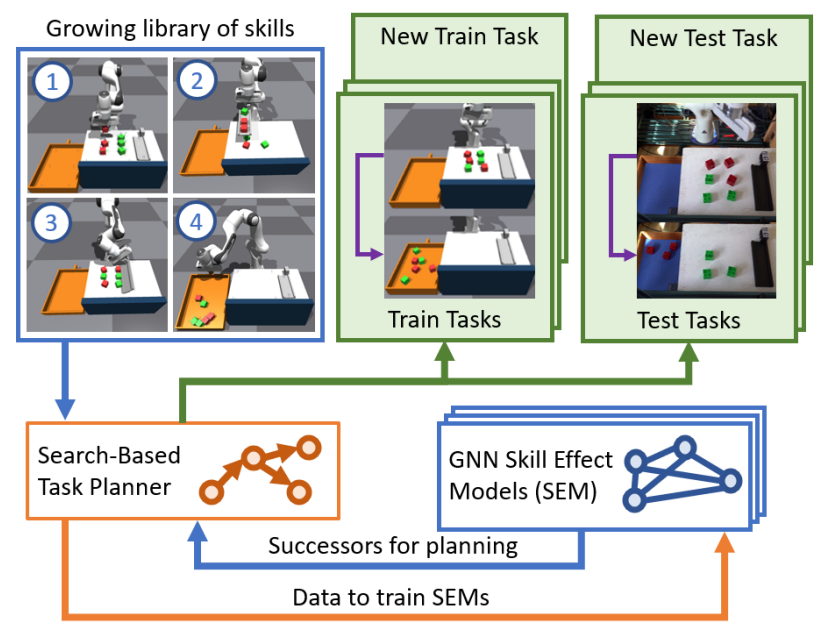 Search-based task planning with learned skill effect models for lifelong robotic manipulationIn 2022 International Conference on Robotics and Automation (ICRA), 2022
Search-based task planning with learned skill effect models for lifelong robotic manipulationIn 2022 International Conference on Robotics and Automation (ICRA), 2022


2020
-
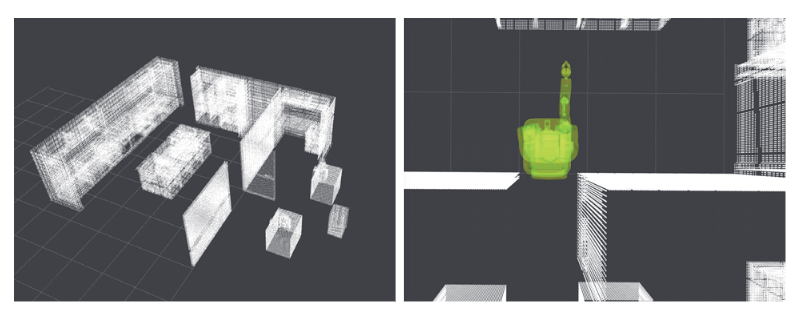
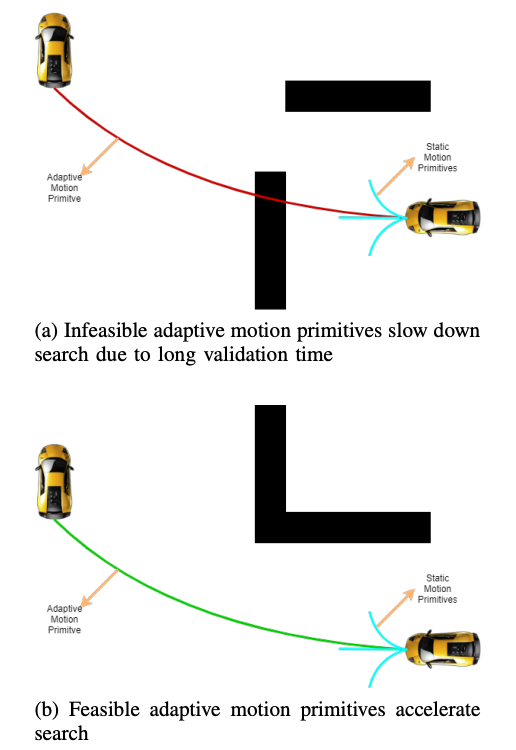 Learning to use adaptive motion primitives in search-based planning for navigationIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
Learning to use adaptive motion primitives in search-based planning for navigationIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020

2017
-
 Learning to avoid local minima in planning for static environmentsIn Proceedings of the International Conference on Automated Planning and Scheduling, 2017
Learning to avoid local minima in planning for static environmentsIn Proceedings of the International Conference on Automated Planning and Scheduling, 2017 -